Tachymetrie se používá při současném měření polohopisu a výškopisu. Polohu podrobných bodů určujeme ze sítě tzv. tachymetrických stanovisek polárními souřadnicemi – vodorovným úhlem a délkou. Výšku podrobných bodů určujeme trigonometricky – ze změřeného svislého úhlu a délky.
K tachymetrickému měření se používají přístroje označované jako tachymetry. Tachymetr je přístroj umožňující měření délek a vodorovných a svislých úhlů. Tachymetrem je každý teodolit vybavený svislým kruhem a dálkoměrnými ryskami – nitkový tachymetr (kromě klasického nitkového tachymetru lze použít i tachymetr autoredukční – přímé určení vodorovné vzdálenosti, nebo tachymetr diagramový – přímé určení vodorovné vzdálenosti a převýšení). Součástí vybavení při použití nitkového tachymetru jsou také tachymetrické latě (slouží k měření délek). Vedle nitkového tachymetru je možné použít i elektronický tachymetr (v současnosti nejpoužívanější), který je namísto tachymetrické latě vybaven odrazným hranolem (reflektorem) na výsuvné výtyčce sloužícím opět k měření délek. Podle použitého tachymetru se pak tachymetrie dělí na tachymetrii nitkovou a tachymetrii s elektronickým tachymetrem a blokovou tachymetrii.
Volba stanovisek
Síť stanovisek se obvykle buduje před zahájením vlastního podrobného měření. Stanoviska se volí s ohledem na dosahovou vzdálenost nitkového tachymetru (cca 150 m) na takových místech, aby z nich bylo možné určit co největší počet podrobných bodů výškopisu. Sousední stanoviska jsou od sebe vzdálena 150 až 200 m tak, aby bylo možné zaměřit všechny podrobné body výškopisu. Volby stanovisek závisí také na tvaru a rozloze zaměřovaného území. Pokud je třeba zaměřit menší lokalitu, tvoří síť stanovisek polygonový pořad (nejčastěji uzavřený). Je-li třeba zaměřit větší lokalitu, tvoří síť stanovisek několik vhodně rozvržených polygonových pořadů nebo trojúhelníkové řetězce. Pokud z takovéto sítě není některé podrobné body výškopisu možné zaměřit, volí se další (vedlejší) stanoviska. Ta se určují zpravidla rajonem, příp. protínáním vpřed, současně s podrobným měřením. Výšky stanovisek se určují technickou nivelací, příp. trigonometricky. Po zaměření sítě stanovisek, se vypočte jejich poloha (pravoúhlé souřadnice Y, X) a výška.
Postup měření
Měření začíná na jednom ze stanovisek na okraji lokality. Nejprve se připraví tachymetr k měření (centrace, horizontace, urovnání indexové libely – je-li jí přístroj vybaven). Potom se změří výška přístroje. Následují orientace na sousední stanoviska. Obvykle se na jedno z těchto stanovisek (zpravidla předchozí) nastaví čtení 0 gon, což umožňuje odečítat přímo orientované směrníky. Dále se přečtou na latích postavených na sousedních stanoviscích následující hodnoty: laťový úsek, vymezený dálkoměrnými ryskami, hodnota střední rysky, vodorovný a svislý úhel (vše ve dvou polohách dalekohledu). Následuje měření podrobných bodů výškopisu. Toto měření se provádí již jen v jedné poloze dalekohledu. Pomocníci staví na podrobné body podle pokynů vedoucího skupiny tachymetrické latě, na nichž se opět čte laťový úsek a hodnota střední rysky a vodorovný a svislý úhel. Po zaměření všech podrobných bodů výškopisu v okruhu stanoviska se provede kontrolní zaměření prvního orientačního bodu a při shodě orientačního směru lze přejít na další stanovisko. Pro kontrolu orientace se doporučuje vedle orientací na sousední stanoviska zaměřit ještě jeden směr na nějaký trvale signalizovaný bod (věž kostela, bleskosvod) a tento směr po určitém počtu bodů zkontrolovat.
Poznámka
Měřická skupina se skládá z vedoucího skupiny, technika a pomocníků. Vedoucí skupiny řídí celé měření, zavádí pomocníky s tachymetrickými latěmi na podrobné body výškopisu a kreslí výškopisný měřický náčrt. Technik obsluhuje tachymetr a zapisuje (není-li ve skupině zapisovatel) naměřené údaje do tachymetrického zápisníku (občas je třeba zkontrolovat, zda čísla podrobných bodů výškopisu v zápisníku a ve výškopisném měřickém náčrtu souhlasí). Pomocníci staví tachymetrické latě na podrobné body výškopisu.
Poznámka
Čtení horní a dolní rysky na tachymetrické lati se provádí s přesností na milimetry, čtení středí rysky s přesností na centimetry. Laťový úsek se určí z rozdílu horní a dolní rysky.
Poznámka
Při použití diagramového tachymetru se přímo odečítají vodorovné vzdálenosti a převýšení na speciální tachymetrické lati. Základní kružnice se nastavuje na lati na klínovou značku ve výši přístroje.
Výpočet polohy a výšek podrobných bodů výškopisu
Poloha se určuje polárními souřadnicemi – vodorovným úhlem a délkou. Vodorovný úhel se při nastavení hodnoty 0 gon na předchozí stanovisko měří přímo. Délka se vypočte podle vzorce:

kde
l je laťový úsek,
ε , popř. z je svislý úhel,
k je násobná konstanta (k = 100).
Výška se určí podle vzorce:
kde
HS je výška stanoviska,
h je převýšení, které se vypočte ze vzorce:

vP je výška přístroje,
vZ je čtení střední rysky (výška záměry).
V tomto případě se k měření používají elektronické tachymetry s odrazným hranolem (reflektorem) na výsuvné výtyčce. Elektronické tachymetry mají řadu předností. Vyznačují se vysokou přesností délkového měření (1 až 3 cm podle způsobu signalizace bodu – výtyčka s odrazným hranolem je držena volně v ruce nebo upevněna ve speciálním stojánku) a velkým dosahem (až 3 km). Umožňují měřit buď polární souřadnice nebo relativní pravoúhlé souřadnice a převýšení včetně automatické registrace naměřených dat. Vodorovná délka se pomocí elektronického tachymetru určuje již s fyzikální redukcí a součtovou konstantou.
Tachymetrie s elektronickým tachymetrem
[71] Při této metodě se postupuje obdobně jako při nitkové tachymetrii. Používá se u tzv. velkoplošné tachymetrie. Stanoviska tvoří polygonový pořad. Je nutná vzájemná viditelnost mezi sousedními stanovisky (nevyužívá se plně dosahová možnost přístroje). Pokud není možné ze stanoviska některé podrobné body výškopisu zaměřit, volí se další (vedlejší) stanoviska. Ta se určují zpravidla rajonem. Při výpočtu souřadnic stanovisek se řeší oboustranně orientovaný, popř. vetknutý, polygonový pořad. Od nitkové tachymetrie se tato metoda liší pouze přístrojovým vybavením a vyšší přesností měřených délek.
Bloková tachymetrie
[71] Při blokové tachymetrii se současně s podrobnými body výškopisu určují i stanoviska, a to ve zvoleném souřadnicovém a výškovém systému.
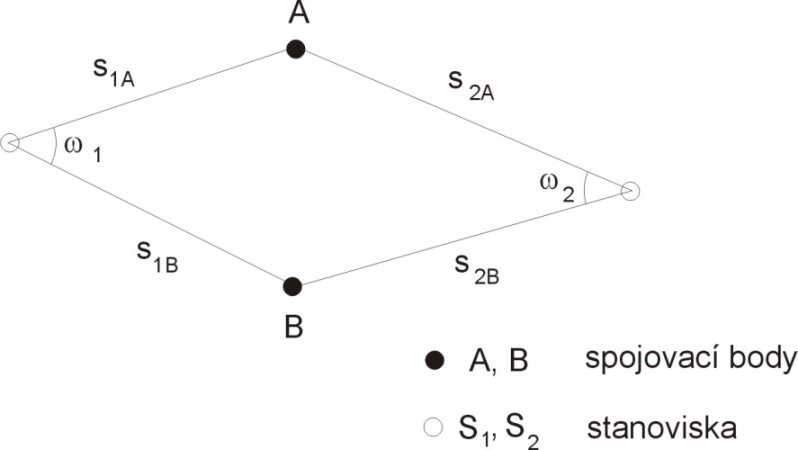
Zaměřované území se rozdělí na bloky. Tvar bloku je přizpůsoben rozsahu území. Blok je tvořen dvěma stanovisky a dvěma spojovacími body. Spojovacím bodem může být kterýkoli podrobný bod výškopisu splňující určité tzv. konfigurační parametry. Vzájemná viditelnost mezi stanovisky tedy není nutná, což umožňuje libovolnou orientaci osnovy směrů na stanovisku. Spojovací bod je zaměřen z obou stanovisek patřících do bloku. Pro kontrolu je vhodné volit namísto dvou čtyři spojovací body. Měření se připojuje na dva pevné body. Pro kontrolu je však vhodné měření připojit na více pevných bodů, u nichž známe souřadnice i výšky.
Poznámka
Z obrázku je patrné, že v bloku je měřen nadbytečný počet veličin (2 úhly, popř. 4 směry a 4 délky, což je 6, popř. 8 veličin > (2n-3) nutných veličin), což nám dává možnost vyrovnání.
![Ukázky sítí aplikovatelných pro metodu blokové tachymetrie [71]](Obrazky/Kapitola15/15x03-Ukazky.siti.gif)
Výpočet je možný provést dvojím způsobem. Buď postupně dvěma rajony a následně protínáním z délek v pomocné soustavě souřadnic dané prvním stanoviskem a nakonec podobnostní transformací [80] , nebo se na každém stanovisku provede převod polárních souřadnic na pravoúhlé, pomocí spojovacích bodů a transformačních rovnic se převedou dílčí pomocné souřadnicové soustavy do jediné a nakonec opět pomocí podobnostní transformace vypočteme souřadnice všech bodů v hlavní soustavě souřadnic.
Poznámka
Přesnost podrobného měření a výsledných výšek podrobných bodů výškopisu mapy se vyjadřuje ve vztahu k blízkým bodům podrobného, příp. základního bodového pole.
Charakteristikou přesnosti určení výšek H podrobných bodů výškopisu je základní střední výšková chyba mH . Výšky souboru podrobných bodů jedné třídy přesnosti musí být určeny tak, aby charakteristika mH nepřekročila kritérium uH uvedené v tabulce 15.1 a u bodů terénního reliéfu (na nezpevněném povrchu) nepřekročila kritérium 3*uH .
Tabulka 15.1. Kritéria přesnosti podrobných bodů výškopisu [72]
| Kód charakteristiky kvality | 1 | 2 | 3 | 4 | 5 |
| uH (m) | 0.03 | 0.07 | 0.12 | 0.18 | 0.35 |
| uV (m) | 0.30 | 0.40 | 0.50 | 0.80 | 1.50 |
();Dosažení přesnosti výsledků výškopisu se ověřuje nezávislým kontrolním měřením a určením výšek podrobných bodů výběru a jejich porovnáním s výškami, uvedenými v mapě nebo určenými z vrstevnic.
Pro testování přesnosti výšek podrobných bodů se pro body výběru vypočtou rozdíly výšek ΔH = Hm - Hk , kde Hm je výška podrobného bodu výškopisu a Hk je výška téhož bodu z kontrolního určení. Dosažení stanovené přesnosti se testuje pomocí výběrové střední výškové chyby sH , vypočítané ze vztahu:

Hodnota koeficientu k = 2, má-li kontrolní určení stejnou přesnost jako metoda určení výšek, nebo k = 1, má-li kontrolní určení podstatně vyšší přesnost, tj.

Přesnost výšek se pokládá za vyhovující, když:
platí:
je přijata statistická hypotéza, že výběr přísluší stanovené třídě přesnosti, tj. že výběrová střední výšková chyba vyhovuje kritériu podle tabulky 15.2:
Tabulka 15.2. Kriteria vyberove stredni vyskove chyby [72]
Na zpevněném povrchu Na nezpevněném povrchu Pro výšky Hm určené z vrstevnic sH≤ωN*uH sH≤3*ωN*uH sH≤ωN*uv kde koeficient ωN má při volbě hladiny významnosti α = 5% hodnotu rovnou 1,1 pro výběr rozsahu N od 80 do 500 bodů a hodnotu rovnou 1,0 pro výběr větší než 500 bodů. Při volbě jiné hladiny významnosti má koeficient hodnotu:
kde

je kritická hodnota rozdělní o N stupních volnosti na hladině významnosti . Viz [72].
[80] Pokud je měření připojeno na dva pevné body, použije se k vyrovnání (je měřen nadbytečný počet veličin) podobnostní transformace (podmínka konformity a úprava délek modelem q). Pokud je měření připojeno na více než dva pevné body, použije se k vyrovnání Helmertova transformace (lineární konformní transformace – podobnostní , při níž se transformační koeficienty odvozují z podmínky minima součtu čtverců odchylek souřadnic identických bodů). Namísto podobnostní transformace je možné také použít vyrovnání metodou nejmenších čtverců (podmínka minima součtu čtverců odchylek).